电磁炉故障维修|电磁炉的故障分析与检修方法( 五 )
开关电源工作后,T1的次级绕组输出的脉冲电压通过整流、滤波便获得直流电压:通过D1整流,C3滤波产生20V电压,该电压不仅通过R6、D4加到IC1[4]脚,取代启动电路为它供电,而且为功率管的驱动电路、风扇电机等电路供电;通过D2整流,C4滤波产生5V电压,为芯片IC3(HT46R12)、蜂鸣器、温度取样等电路供电 。
为了防止IC1内的开关管在截止瞬间被过高的反峰电压击穿,本电路在开关变压器T1的初级绕组两端设置了R5、D3和C5组成了尖峰脉冲吸收回路 。
(3)稳压控制
当市电电压升高或负载变轻引起开关电源输出电压升高时,滤波电容C46两端升高的电压通过R9、R10取样的电压超过2.5V,再经IC2放大后,使Q1导通加强,从它c极输出的电压升高,通过R8为IC1[3]脚提供的误差电压升高,被IC1内部电路处理后,使开关管导通时间缩短,开关变压器T1存储的能量下降,开关电源输出电压下降到正常值,反之,稳压控制过程相反 。因此,通过该电路的控制确保开关电源输出电压的稳定 。
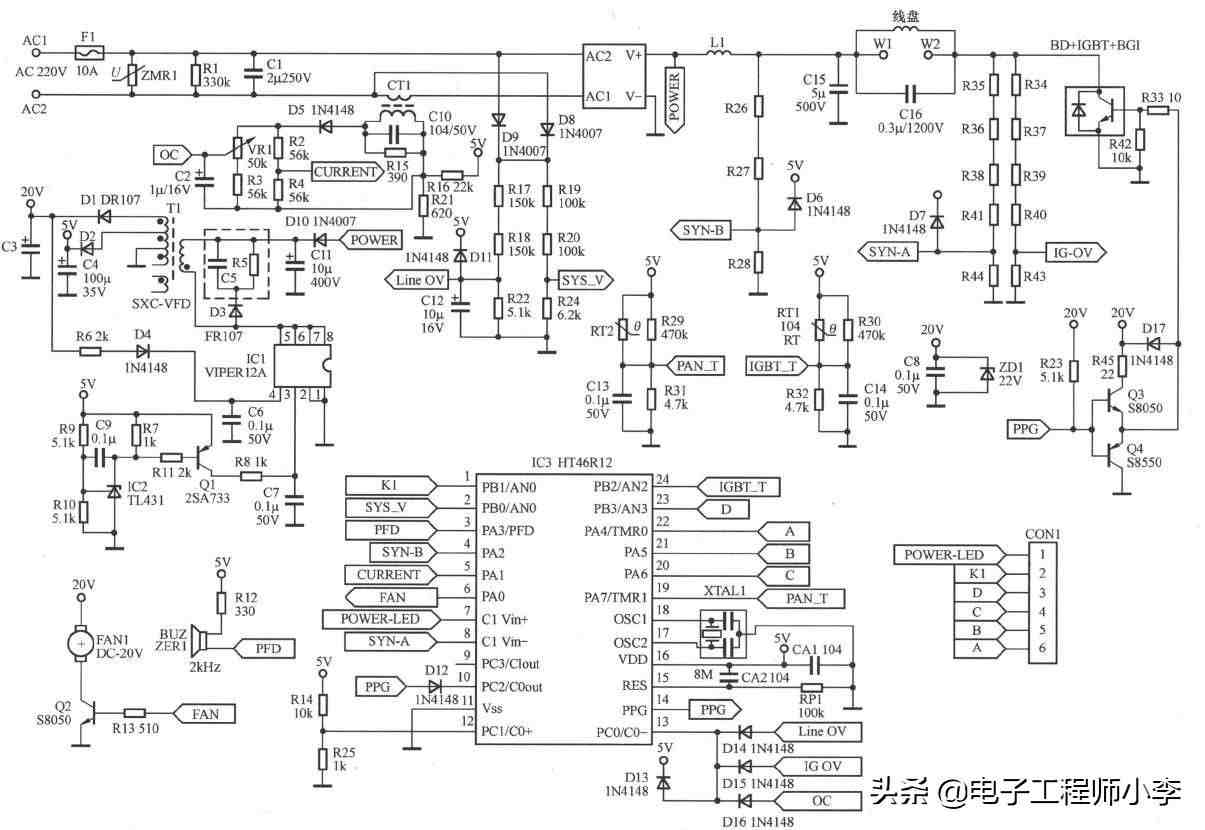
图12-12 奔腾采用“迅磁”小板构成的电磁炉电路
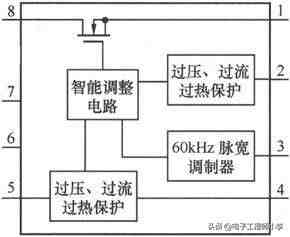
图12-13 电源模块VIPE百思特网R12A的内部构成方框图
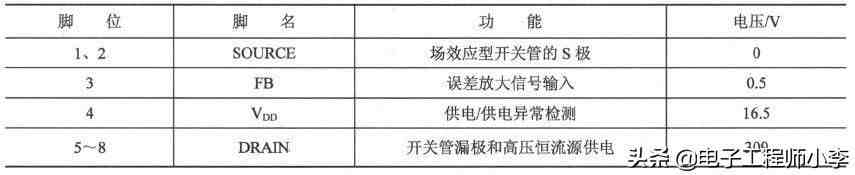
表12-2 VIPER12A的引脚功能和电压数据
(4)欠压保护
当C6漏电使IC1[4]脚在开机瞬间不能建立14.5V以上的电压时,IC1内部的电路不能启动;若R6、D4、D3开路或T1异常为IC1提供启动后的工作电压低于8V时,IC1内的欠压保护电路动作,避免了开关管因激励不足而损坏 。另外,IC1还具有过压和过流保护电路 。
2.专用芯片HT46R12的简介
专用芯片HT46R12不仅具有完善的控制功能,还能产生功率管激励脉冲 。
(1)HT46R12的引脚功能
专用芯片HT46R12的引脚功能如表12-3所示 。
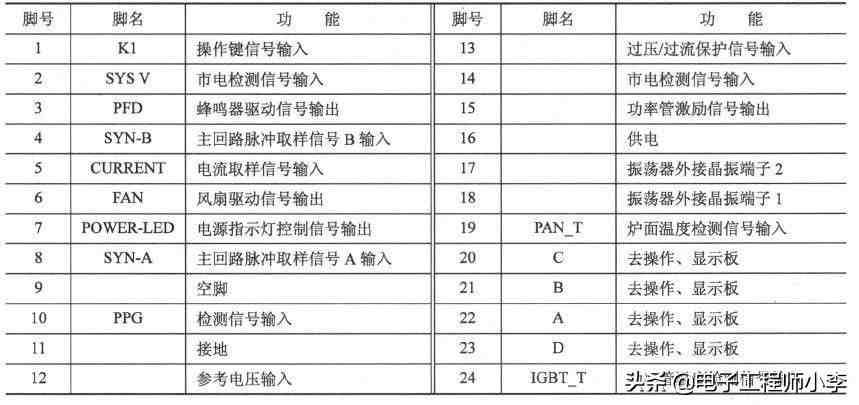
表12-3 专用芯片HT46R12的引脚功能
(2)芯片启动
低压电源输出的5V电压加到芯片IC3(HT46R12)[16]脚,为它供电 。IC3获得供电后,它内部的振荡器与外接的晶振XTAL1通过振荡产生8MHz时钟信号 。随后IC3在内部复位电路的作用下开始工作,并输出自检脉冲,确认电路正常后进入待机状态 。待机期间,IC3[14]脚输出功率管激励信号为低电平,使推挽放大器的Q4导通、Q3截止,功率管IGBT截止 。
3.锅具检测电路
电磁炉在待机期间,按下“开/关”键后,IC3内的CPU从存储器内调出软件设置的默认工作状态数据,控制操作显示屏显示电磁炉的工作状态,由[14]脚输出的启动脉冲通过Q3、Q4推挽放大,利用R33限流使功率管IGBT导通 。IGBT导通后,线盘和谐振电容C16产生电压谐振 。主回路工作后,市电输入回路产生的电流被电流互感器CT1检测并耦合到次级绕组,通过C10、R15抑制干扰脉冲,通过D5半波整流,再通过R2和R4取样产生取样电压CURRENT,加到IC3的[5]脚 。当炉面上放置了合适的锅具时,因有负载使流过功率管的电流增大,电流检测电路产生的取样电压CURRENT较高 。该电压被IC3检测后,判断炉面已放置了合适的锅具,控制电磁炉进入加热状态 。反之,判断炉面未放置锅具或放置的锅具不合适,控制电磁炉停止加热,IC3[3]脚输出报警信号,驱动蜂鸣器BUZZER1鸣叫报警,提醒用户未放置锅具或放置的锅具不合适 。
4.同步控制电路
该机同步控制电路由主回路脉冲取样电路、芯片IC3和取样电路等构成 。线盘右端电压通过R35~R41、R43、R44取样产生取样电压SYN-A,加到IC3(HT46R12)的[8]脚,它左端电压通过R26~R28取样产生的取样电压SYN-B,加到IC3的[4]脚 。IC3通过对[4]、[8]脚输入的脉冲进行判断,确保线盘对谐振电容C16充电期间,以及C16对线盘放电期间,[14]脚均输出低电平脉冲,使功率管IGBT截止 。只有线盘通过C15、功率管内的阻尼管放电结束后,IC3的[14]脚才能输出高电平电压,该电压通过驱动电路放大后使功率管IGBT再次导通 。因此,通过同步控制实现了功率管的零电压开关控制 。
5.电流自动调整电路
该机的电流自动调整电路由电流取样电路、IC3内的CPU为核心构成 。主回路工作后,市电输入回路产生的电流被电流互感器CT1检测并耦合到次级绕组后,通过C10、R15抑制干扰脉冲,通过D5半波整流,再通过R2和R4取样产生取样电压CURRENT,加到IC3[5]脚 。若主回路的电流较大,CT1输出电压升高,CURRENT增大 。CURRENT被CPU检测后,IC3使功率调整信号的占空比减小,功率管导通时间缩短,主回路的电流减小 。反之控制过程相反,从而实现了电流的自动调整 。
- 公寓|公寓要交契税和维修基金吗
- 春节|春节车被撞了后面去维修可以吗
- 出故障●一个都不少
- 二手房已过户才发现墙体开裂房屋维修费谁承担
- 外墙|外墙渗水是物业还是业主维修
- 空调|空调fo是什么故障会造成呼吸问题吗
- 应聘机电维修工求职信如何写?
- 毕业生求职信—汽车检测与维修技术专业怎么写?
- 学校零星维修工程合同如何写?
- 汽车维修工实习报告如何写?