神经网络控制|神经网络智能控制系统的研发
神经网络控制(神经网络智能控制系统的研发)
摘要:首先分析了目前先进控制技术工程实施过程中的技术瓶颈,在此基础上提出了新的先进控制技术建模方法 。本文基于工业自动化通用技术平台(IAP),采用图形化控制策略组态技术开发了一套神经网络智能控制系统,该系统具有基于参考模型跟踪的控制结构,可快速自适应地调整控制器参数 。仿真实验结果表明,神经网络智能控制系统的精度高,稳定性好,可成为处理复杂工业过程,尤其是解决不确定和非线性领域问题的有效工具 。
0引言
目前的工业过程控制系统中,生产的核心部分往往具有多变量强耦合、非线性、强干扰、参数时变、大时滞、信息不完全、约束性强等特征 。随着过程工业日益走向大型化、连续化、综合化,人们对生产过程的实时性、整体性的要求也越来越高,所以若想从全局出发协调和处理装置间复杂的耦合与制约关系、求得全局最优,最有效的方法是采用先进控制技术,或在常规控制的基础上叠加先进控制的补偿分量 。
1先进控制技术应用现状
自上世纪70年代起,先进控制技术已有40余年的发展历程,目前已取得一定的成果,并在流程工业上得到了一定程度的应用 。先进控制技术的内涵丰富,具有时代特征,至今没有一个严格统一的定义 。但先进控制的任务是明确的[1],即用来控制常规控制效果差,甚至无法控制的复杂工业过程 。先进控制理论的研究主要包括预测控制、模糊控制、最优控制、解耦控制、推理控制、鲁棒控制、神经网络控制、内膜控制及自适应控制等,其中神经网络是目前研究较多的一种技术 。
先进控制技术的理论计算较复杂,传统的实现方式需要单独安装、配置一个软件包或计算站,但其执行过程始终是个“黑箱”,模块或软件内部计算过程无法观察百思特网,变量数据无法监测,给系统调试和后期维护都造成了一定的困难 。加之,先进控制技术的形态特征与传统控制的组态又有很大的不同,两者在设计、开发、调试、运行和维护等方面都存在着较大甚至根本性的差异,使得企业在导入先进控制技术过程中需要投入大量的资金,运行维护成本也非常高,这是目前生产企业先进控制系统投入率偏低的主要原因 。
为解决以上问题,本文采用新的软件工程方法开展研究,研发了一种神经网络智能控制系统,可以有效地降低神经网络技术的导入成本和风险,缩小先进控制与传统控制的差别,实现先进控制与传统控制同构组态,为现代控制理论的工程应用创造更好的技术环境 。
2对角递归神经网络
神经网络是模拟人类大脑中神经网络的结构与行为的一种模型,具有高度的并行分布式处理、自适应能力及很强的动态特性,为解决非线性与不确定领域的问题提供了一条新的途径 。神经网络按照连接方式的不同分为前馈神经网络与递归神经网络两种,不同之处在于递归神经网络是动态网络 。系统辨识时,若采用前馈神经网络,则存在一些不足:首先必须假定系统的模型类别和阶次;其次随着系统阶次增加,神经网络结构迅速膨胀,学习收敛速度下降 。而递归神经网络利用网络内部的状态反馈描述系统的非线性动力学特性,可以弥补以上缺陷[2] 。
大多数情况下,最好的神经网络结构是只在一个很小的单元组中使用反馈 。因为网络的权值(参数)个数越少,对模型的随机性影响越小;网络结构越简单,算法的收敛速度越快 。所以,简化递归神经网络的结构、缩短训练时间后就形成了一种新型神经网络范式——对角递归神经网络(Diagonal Recurrent Neural Network,DRNN) 。
对角递归神经网络的结构有3层,分别为输入层、隐含层与输出层,其结构如图1所示 。隐含层由一组仅接收自己内反馈,与其神经元无关的递归神经元组成 。简化了网络结构,减少了需要调整的参数,加快了收敛速度 。
图1对角递归神经网络结构
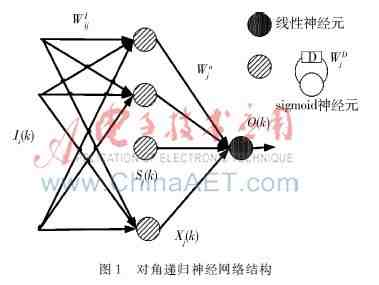
对于任意的离散时刻k,Ii(k)是网络的第i个输入,Sj(k)是隐含层第j个递归神经元的输入总和,Xj(k)是递归神经元的输出,一般取j=2i+1 。O(k)是对角递归神经网络的输出 。WIij、WDj和WOj分别表示输入层、隐含层和输出层的权值 。
对角递归神经网络的动态方程为[3]:
其中f()为隐含层递归神经元的激励函数:
对角递归神经网络的输出O(k)对权值WIij、WDj和WOj的梯度分别为:
3对角递归神经网络控制系统
- 史上最漫长的一场战争:理性控制欲望之战!
- 光纤入户设备的广告词怎么写?
- 体智能感恩节活动主持词怎么写?
- 婚礼接吻主持词怎么写?
- 控制愤怒读后感写法怎么样?
- 智能家居商业策划书怎么写?
- 质量控制口号怎么写?
- 比赛的承诺书范文有没有?
- 《论内部控制理论创新研究》论文开题报告如何写?
- 《智能快递》阅读答案怎么写?