神经网络控制|神经网络智能控制系统的研发( 二 )
【神经网络控制|神经网络智能控制系统的研发】
神经网络智能控制系统的系统结构如图2所示,其中控制器与辨识器均由对角递归神经网络组成,分别称为DRNC与DRNI 。由辨识器DRNI网络的输出ym(k)辨识未知的被控设备的实际输出y(k),并提供设备的Jacobian信息给控制器DRNC 。由DRNC的输出u(k)驱动未知的动态系统,使设备的输出y(k)无限逼近期望输出yr(k) 。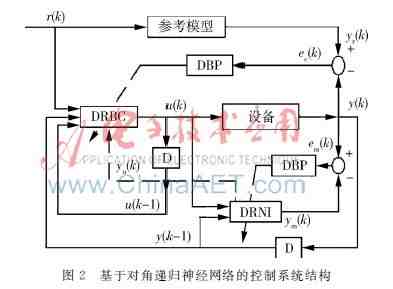
图2基于对角递归神经网络的控制系统结构
31辨识器DRNI 的学习算法
由控制器DRNC产生的当前控制信号u(k)和前一时刻设备的输出y(k-1)作为辨识器DRNI网络的输入 。将DRNI网络的输出ym(k)和y(k)之间的辨识误差带入权值更新公式,调节DRNI网络的权值 。
定义DRNI网络的性能指标函数为:
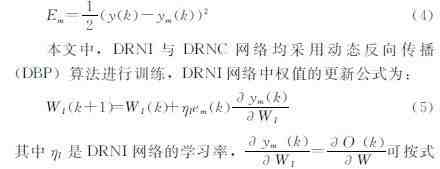
可按式(3)计算 。
32控制器DRNC的学习算法
控制器DRNC网络的输入分别为参考输入r(k百思特网)、前一时刻设备的输出y(k-1)和前一时刻的控制信号u(k-1),输出是设备的控制信号u(k) 。经过几个训练周期调节DRNC网络的权值后,可以使设备的实际输出y(k)与期望输出yr(k)之间的误差达到一个很小的值 。但训练DRNC网络时需要被控设备的Jacobian信息,而该信息通常是未知的,所以需要DRNI为DRNC估计被控设备的敏感度函数yu(k)(Jacobian信息) 。
定义DRNC网络的性能指标函数为:
DRNC网络中权值的更新公式为:
其中C是DRNC网络的学习率 。因子yu(k)≡y(k)/u(k)代表被控设备的敏感度,一般很难通过直接计算获得,但若DRNI网络已得到较好的训练,可近似认为:
所以,通过轮流训练DRNI和DRNC网络,可以调节得到更有效的DRNC网络权值,这即是基于对角递归神经网络的控制系统的基本原理[4] 。
4神经网络智能控制系统组态
41工业自动化通用技术平台(IAP)
工业自动化通用技术平台(Industry Automation Platform,IAP)是由福建中海创集团研发的一种基于图形化、模块化控制逻辑组态技术的分布式控制系统 。IAP平台的仿真软件工具主要由系统结构组态软件IAPplant、模块化控制策略组态软件IAPlogic和动态仿真软件IAPsimu等部分构成 。
IAPplant软件采用面向设备的多维立体方式构建现代化工厂的工艺设备和控制设备,将其他系统软件无缝地连接在一起,提供相互之间的系统信息交互通道,实现控制系统构架一体化的数据管理环境 。IAPlogic软件摒弃了传统的梯形图编程模式,采用图形化的组态方式,实现了控制策略的组态分析、无扰动在线重构、实时监控、逻辑执行趋势监控、在线修改参数、提供了一个面向不同品牌控制器的跨平台控制策略组态开发和管理工具 。IAPsimu软件可以在没有硬件的情况下,基于PC机模拟实际的控制站运行 。IAPsimu软件接收源自IAPlogic软件的控制策略组态,经过运算后,产生相应的输出结果,反馈给IAPlogic软件,实现对控制策略的计算、调试与模拟运行 。
42系统控制结构组态
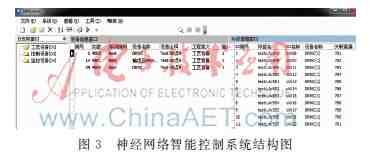
本文的神经网络智能控制系统是基于IAP平台研发的,首先在系统结构组态软件IAPplant中建立对角递归神经网络控制系统工程管理架构和IO体系,根据神经网络控制系统中各个变量定义IAPplant软件中IO点的具体信息,如IO点序的分布、IO类型、IO数量、标签名、注释等 。图3所示是神经网络智能控制系统结构设计图 。
43系统控制策略组态
根据神经网络智能控制系统的算法机理,在IAPlogic软件中对完整的系统进行控制策略组态 。假设一个有代表性的非线性被控对象[5],该设备可用差分方程描述为:
参考模型的差分方程为:
yr(k+1)=0.6yr(k)+r(k)(10)
参考输入r(k)=sin(2k/25)+sin(2k/10)+2 。系统的控制目标是确定设备输入yr(k)使lim|y(k)-yr(k)|<,其中是一个非常小的常数 。
本文仅以参考模型与被控设备的组态设计为例,说明IAPlogic软件组态设计原理与过程 。根据参考模型与被控设备的差分方程,在IAPlogic软件中采用基础元件和连接线实现控制逻辑组态,如图4所示 。

图4参考模型与被控设备控制策略组态
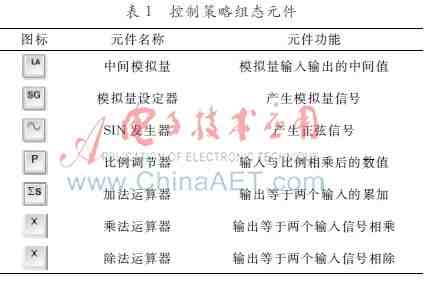
神经网络智能控制系统的控制策略组态设计完成后,进行控制策略的分析、链接、逻辑传送,确认无误后,即可开始仿真实验 。表1列出了图4所需用到的IAP基础元件列表 。
- 史上最漫长的一场战争:理性控制欲望之战!
- 光纤入户设备的广告词怎么写?
- 体智能感恩节活动主持词怎么写?
- 婚礼接吻主持词怎么写?
- 控制愤怒读后感写法怎么样?
- 智能家居商业策划书怎么写?
- 质量控制口号怎么写?
- 比赛的承诺书范文有没有?
- 《论内部控制理论创新研究》论文开题报告如何写?
- 《智能快递》阅读答案怎么写?