机器人定位技术|移动机器人全局定位技术与方法
机器人定位技术(移动机器人全局定位技术与方法 )
作者|陈大鑫
人工智能不仅要复现人类的大脑,还要构建容纳智能大脑的身体,机器人将是人工智能的完全体 。
8月7日-8月9日,2020年全球人工智能和机器人峰会(简称“CCF-GAIR 2020”)在深圳如期举办!CCF-GAIR由中国计算机学会(CCF)主办,雷锋网、香港中文大学(深圳)联合承办,鹏城实验室、深圳市人工智能与机器人研究院协办,以“AI新基建 产业新机遇”为大会主题,致力打造国内人工智能和机器人领域规模最大、规格最高、跨界最广的学术、工业和投资领域盛会 。
今年CCF-GAIR 2020 的“机器人前沿专场”汇集了来自学术界和产业界的专家、有院士级人物、承担国家级机器人研究项目的大牛以及产研能力兼具、奋斗在机器人商业化一线战场的开拓者 。
本次专场首先出场的嘉宾是加拿大阿尔伯塔大学终身教授张宏 。张宏教授是加拿大工程院院士、IEEE Fellow 。曾经担任在温哥华举行的2017年IEEE 世界智能机器人与系统大会(IROS)总主席,最近马上要加入中国南方科技大学电子与电器工程系 。
迄今为止,张宏教授已在国际顶级期刊及重要会议上发表了将近200余篇文章,涉及机器人操作、多智能系统、视觉检测和视觉导航 。张宏教授今天的演讲主题是《移动机器人全局定位技术与方法》 。

张宏:
大家早上好,非常高兴有机会和大家在这里交流一下我在移动机器人全局定位话题的了解 。今天是以分享学术研究的角度给大家做报告,其中包括我所了解到这方面研究的回顾,也包括我本人近年的工作 。
1 机器人导航
大家都知道,机器人分不同形式,有操作的机器臂,还有移动机器人,所有移动机器人都需要进行导航,包括防爆机器人、双足机器人、四足机器人、清洁机器人、UVA、自动驾驶机器人等等,所有的移动机器人都必须有一个自主导航的功能 。

我今天的报告围绕移动机器人导航这个话题,首先给大家介绍一下导航都牵涉到的几个方面,今天的重点是放在移动机器人的全局定位的这个问题上 。机器人定位这件工作需要一些传感信息,对于环境感知的传感器,主要讲两大类:激光雷达和视觉 。主要的时间回顾一下过去和最近机器人、移动机器人定位方面的研究工作,最后花几分钟和大家分享这个研究方向的展望 。
【机器人定位技术|移动机器人全局定位技术与方法】
大家对于移动机器人这个题目应该不陌生,传统的研究方向起码包括这几类:轨迹规划、避碍、构建地图和定位 。构建地图和定位这两个工作又是耦合的,没有地图也就谈不到定位,我们做地图的过程当中也需要定位,所以这两件工作必须同时完成 。二者的同时研究称之为SLAM, 即simultaneouslocalization and mapping的缩写 。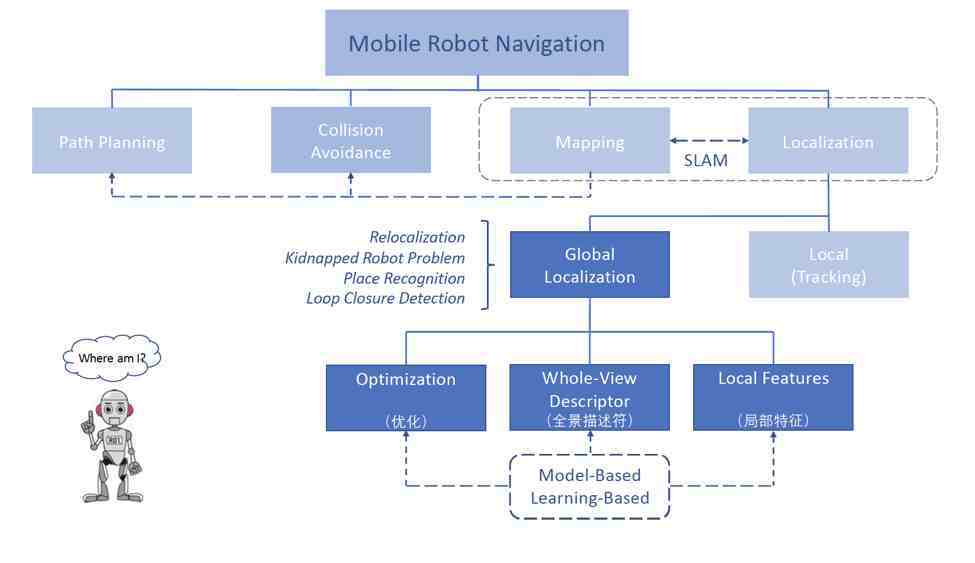
2 机器人定位:局部vs全局
今天的报告侧重于定位问题,定位又分为全局定位和局部定位,为了完成这件工作,有三类传统方式:优化方法、全景描述方法和局部特征匹配方法 。任何一种方法都必须有传感器信息的支持,我今天主要讲如何利用激光雷达和视觉信息完成全局定位 。
如何完成全局定位呢?可以用传统的手工建立模型的方法,也可以用机器学习的方法,我们讲定位这件事时有一个假设:地图是已知的 。刚刚已经提到,定位这件工作分两个类,一类是局部定位/精定位,前一瞬间机器人做动作的时候位置是已知的 。另一类为全局定位更难一些 。全局定位的困难和挑战,来源于三个方面:
1、缺乏先验知识;即前一瞬间机器人的位置是未知的 。
2、在重新定位和闭环检测的时候,即机器人回到某个曾访问过的位置,会发生各种各样的变化,包括光照、视角的变化,同时也有一些动态的物体造成的变化;
3、大尺度 。因为常常地图包含了很多不同的位置,把目前传感器观察到的信息和地图里面的不同位置的信息进行匹配时,会牵涉到计算复杂性的问题,我们把这个挑战称之为大尺度问题 。
谈到这里不妨从仿生学看看自然界的鸟类是如何完成这件工作的,并从中得到启发 。大家肯定知道候鸟导航能力是相当强的,可以跨越超过一万公里之外的目的地,顺利完成导航任务 。它们是如何完成的呢?无外乎是依靠如下几类传感技术:
- 扫地机器人|扫地机器人哪个牌子好,扫地机器人排行榜
- 扫地机器人|扫地机器人排行榜,扫地机器人拖地效率排行盘点
- 信息技术背景下如何开展传统文化节日教育
- 机器人电影|世界十大机器人电影排行榜,机器人题材电影排名前十
- 测控技术与仪器专业个人工作简历怎么写?
- 摄影摄像技术专业求职简历怎么写?
- 毕业生求职信—汽车检测与维修技术专业怎么写?
- 信息技术专员毕业生个人简历如何写?
- 技术部经理辞职报告怎么写?
- 数控技术专业求职信写法怎么样?