机器人定位技术|移动机器人全局定位技术与方法( 五 )
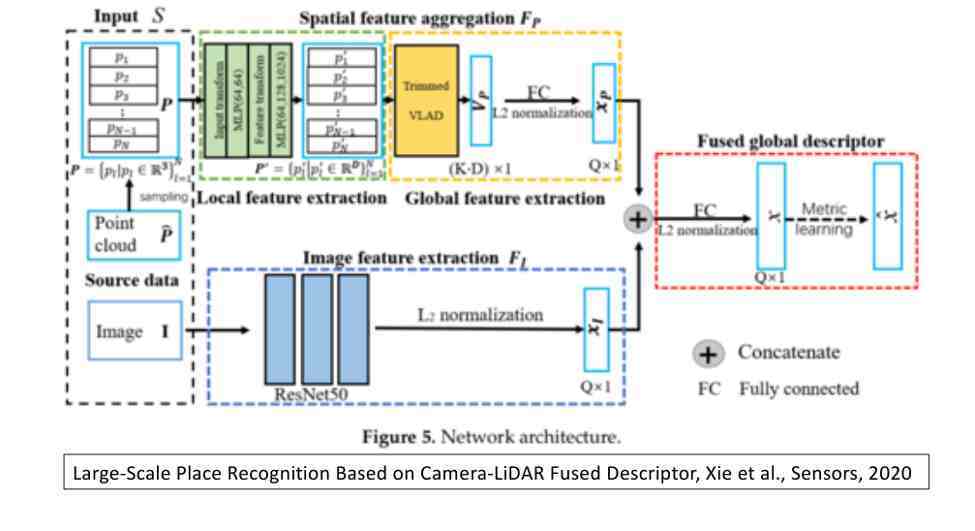
在今年刚刚发表的文章中,同样也是利用对激光雷达和视觉图像信息融合完成全局定位,但全部工作是利用深度神经网络完成 。在该方法中,由点云、图像分别各产生一幅描述符,然后对百思特网两个描述符进行融合,之后产生融合后的描述符,这个融合后的描述符为全局描述符,用来完成全局定位工作 。
5 未来展望和总结
最开始把导航工作分成几个模块,其中包括刚刚提到了的SLAM,泛义SLAM把避障和轨迹规划也归纳到其中 。SLAM技术是移动机器人必不可少的工具,过去二三十年的移动机器人导航研究工作重心放在SLAM,但构建地图的目的局限于为了完成定位 。现在大家逐渐发现,我们只支持定位的地图是不足以完成导航的,因为导航同样也需要避障和轨迹规划,所以我们就需要搭建更稠密的地图,开发Dense Mapping算法 。
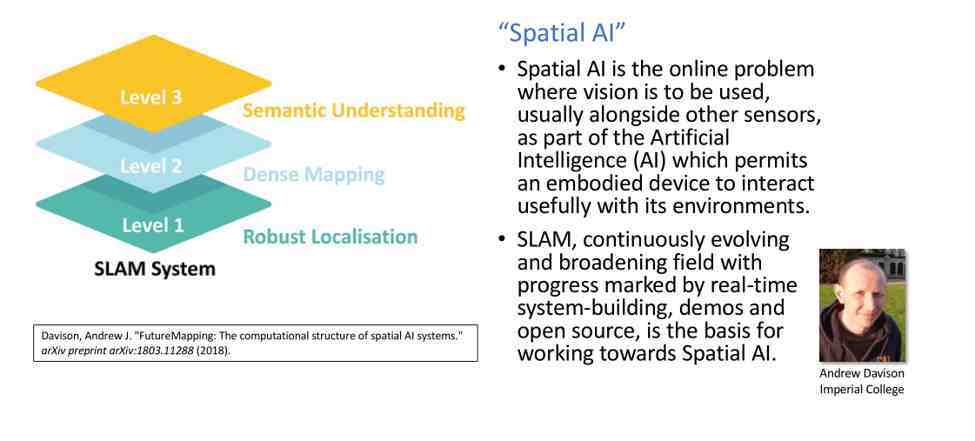
另外一个移动机器人导航重要的研究方向是如何对环境进行有效的语义刻画 。为什么要对环境做语义刻画呢?首先,语义刻画衔接了我们与机器人对环境的理解的差距,起着桥梁的作用 。再者,通过对环境的语义表达,其结果会更简洁和抽象,具备环境信息处理时的优点 。所以语义刻画是目前业界比较关注的研究方向,ppt中这个白皮书的作者,是做SLAM工作、大家熟悉的AndrewDavison,白皮书中他提出了Spatial AI的概念 。我们做移动机器人工作也是在做人工智能,只是跟空间息息相关的人工智能,而SLAM技术是人工智能的基础工作,是必不可少的工作 。
如果想在移动机器人导航方面进行更深入的研究,应该明确我们想达到的目的是什么?现在已经有了很多相对成熟的SLAM技术,但距离自主导航远远不够,我们还需要:
1、对环境的语义表达、理解能力 。我们和机器人的理解不一样,机器人生活在数字世界里面,我们生活在抽象的概念里面,让机器人和人共融就必须让机器人具有语义这个层次的推理规划能力,使得机器人可以胜任人们赋予它们的工作 。
2、更高的鲁棒性 。目前移动机器人的鲁棒性尚不能满足实际工作的要求,为了它们能胜任各类任务,鲁棒性需要大幅度的提高 。
3、真正意义上的自主移动机器人 。关键词是“自主”, 而具有这种能力的机器人从我个人角度来看,跟我们目前的研究水平之间还有一定的差距,这也正是大家需要努力的方向 。
- 扫地机器人|扫地机器人哪个牌子好,扫地机器人排行榜
- 扫地机器人|扫地机器人排行榜,扫地机器人拖地效率排行盘点
- 信息技术背景下如何开展传统文化节日教育
- 机器人电影|世界十大机器人电影排行榜,机器人题材电影排名前十
- 测控技术与仪器专业个人工作简历怎么写?
- 摄影摄像技术专业求职简历怎么写?
- 毕业生求职信—汽车检测与维修技术专业怎么写?
- 信息技术专员毕业生个人简历如何写?
- 技术部经理辞职报告怎么写?
- 数控技术专业求职信写法怎么样?